Synchronized experiments
Experimental layout
Our e3Vision system is frame-synchronized between cameras, and can be fully automated and controlled via software. Along with on-camera video compression, it is highly adaptable to many types of experimental scenarios and experimental scales, from 3D tracking of single experimental subjects to large-scale social behavioral recordings.
Each hub maintains its own set of frame-synchronized cameras, and can support independent use cases such as:
Large scale synchronized multi-view
One possible layout combines large-scale experimental subject monitoring with multiple views, such as a combination of
- wide-angle free behavior view
- a high-resolution zoomed view of an area of behavioral detail such as feeding behavior
with each hub supporting up to 7 or 15 cameras.
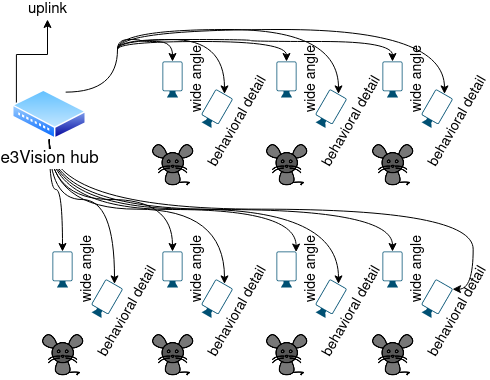
All cameras, including wide view + zoomed view / recorded subject, are synchronized to each other. Each camera group can be independently started/stopped.
Multi-subject 3D tracking with overall wide-angle monitoring
Another possible layout combines a wide-angle unoccluded “overhead” view of multiple experimental subjects, with a detailed 3-axis camera view per subject.
This means each subject’s body posture and behavior can be precisely reconstructed in 3D space.
Each hub supports up to 7 or 15 cameras, or 2 - 5 subjects for individual 3D tracking in this scenario.
multi-subject, multi-camera recording with 3D behavioral and postural tracking
Video synchronization
Hub synchronization layout
Camera frame captures are synced between cameras within each synchronization group. Each camera hub forms its own synchronization group, with each group’s sync source camera connected to the Primary (or Master) camera port.
For larger-scale synchronized recordings of tens of experimental subjects, multiple hubs can be daisy-chained together to share a single synchronization signal.
For more detail on configuring the hub’s BNC connector for output or input, please see the Sync Hub page. For more detail on controlling the synchronization of the saved video recording files, see the synchronization methods section below.
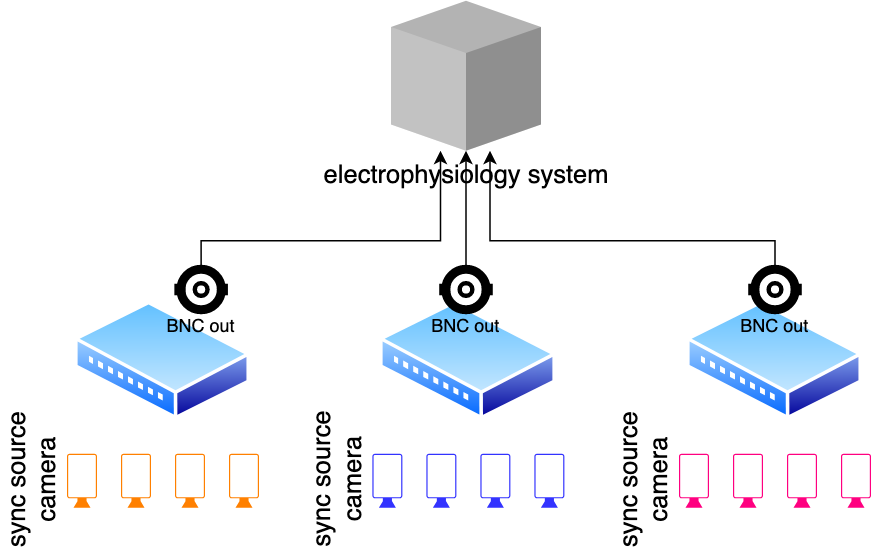
These 3 hubs form 3 distinct sync groups, with 3 separate sync source ("Primary") cameras.
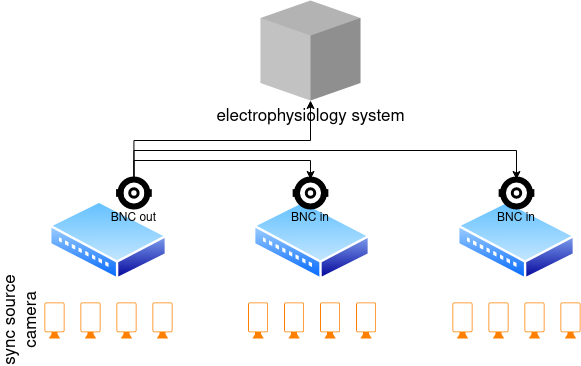
The 3 hubs are daisy-chained together into one large sync group, with the leftmost hub's sync source camera being shared among the additional 2 hubs.
Video recording synchronization methods
The e3Vision system supports many methods of automating the capture of synchronized groups of video recordings:
Long term recording:
-
Passive-recording based: the e3Vision hub outputs synchronization signals from the camera plugged into the
Master/Primaryport, which outputs 10% duty cycle pulses at frame capture during camera streaming, and 50% duty cycle pulses when frames are recorded to disk.With the cameras running continuously, the timing of the these 10%->50% duty cycle pulses can be captured by an external electrophysiology system, and used as reference for the moment of recording start/stop.
For more details, please see the Sync Hub page.
-
Active start/stop: for both MJPEG and H264 videos, we offer an HTTP API to start and stop video recordings, which can be triggered in Python or MATLAB. The true synchronized start time will be within 1 second of the HTTP start command, and the frame-accurate start time can be obtained via method 1.
Please see the API reference for Start saving and Stop saving for more detailed usage.
Short peristimulus video segments:
-
The software also offers HTTP API-triggered peristimulus video recordings (can be done in Python, MATLAB), which gives video segments of up to 20 seconds before and after a triggered event. This results in a video segment centered around an exact trigger time of the API request.
This mode is only available for cameras set to the MJPEG video codec.
Please see the API reference for Trigger video segment for more detailed usage.